关节电机驱动电路图解
关节电机是机器人关节用的伺服电机,是关节执行器的核心驱动部件。它将电机、减速器、传感器和驱动电路集成在一起,能够实现高精度的旋转或直线运动,是四足机器狗、人形机器人、协作机械臂等设备的动力核心部件。
机器人关节电机驱动器的电路原理图通常包括几个关键部分:电机驱动电路、电流采样电路、编码器驱动电路。
1、三相逆变桥驱动电路
三相逆变桥电路采用驱动芯片加MOS驱动方式。JSM6288T是三相半桥驱动芯片,采用上桥跟下桥驱动方式,总共3路也就是需要一个JSM6288T和6个MOS管。电路如下图所示:

三相驱动电路一样,以U相驱动为例,其中U2为三相栅极驱动芯片,Q1,Q2是N沟道MOS管,D7、C16组成上桥自举电路,R15和R17共同构成栅极驱动电阻,实现限流、阻尼、控速,是 MOS 管安全可靠开关的关键。D8、D9为肖特基二极管加速MOS管关断,减小开关损耗。R68为驱动采样功率电阻,大负载时可以更换大功率电阻,防止电流过大烧毁电阻。
D7、C16组成上桥自举电路,自举电路也叫升压电路(这个电路在三相逆变桥电路中起到很关键的作用)。原理是利用自举升压二极管,自举升压电容等元件,使电容放电电压和电源电压叠加,从而使电压升高(类似于升压电路),有的电路升高的电压可达到数倍电源电路,这就是利用自举来抬高电压的。通常用一个电容和一个二级管,电容存储电荷,二极管防止电流倒灌,频率较高的时候,自举电路的电压就是电路输入的电压加上电容的电压,起到升压的作用。同时自举电容的容值也不能过大也不能过小,需根据开关频率选择适当的容值。
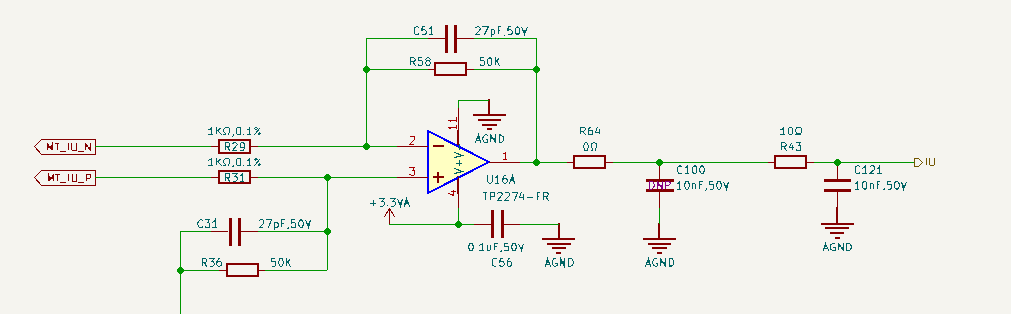
2、电流采样电路
电机控制最基本的要求就是获取电机的电流信息。在每个半桥的下臂都加了一个1mΩ 1W的采样电阻,如上图R68,采集电机相线上电流。电流流过功率电阻,产生电压,经过差分放大电路放大50倍,(50倍是50/1)后送到MCU进行处理。三路电流采样一样,这里只列举一路。电流采样电路如下图所示:
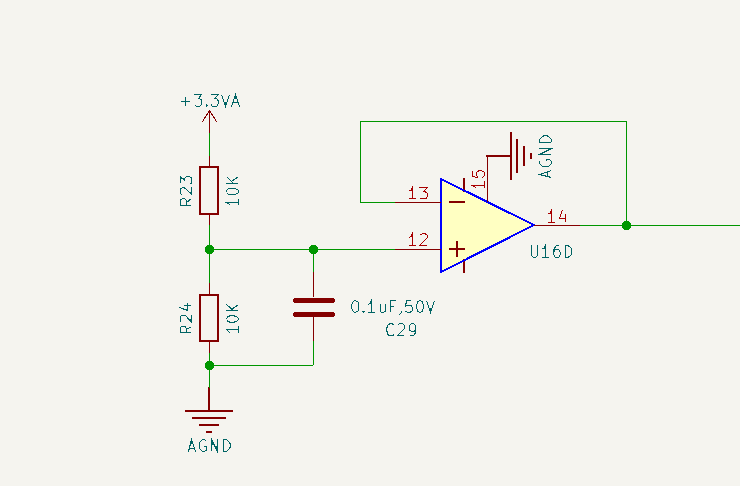
同时,为了给采样电路提供1.65V的参考电压,用运放搭建了个参考电压电路,也称跟随器。利用电阻分压出1.65V,经过跟随器输出稳定的电压。电路图如下图所示:
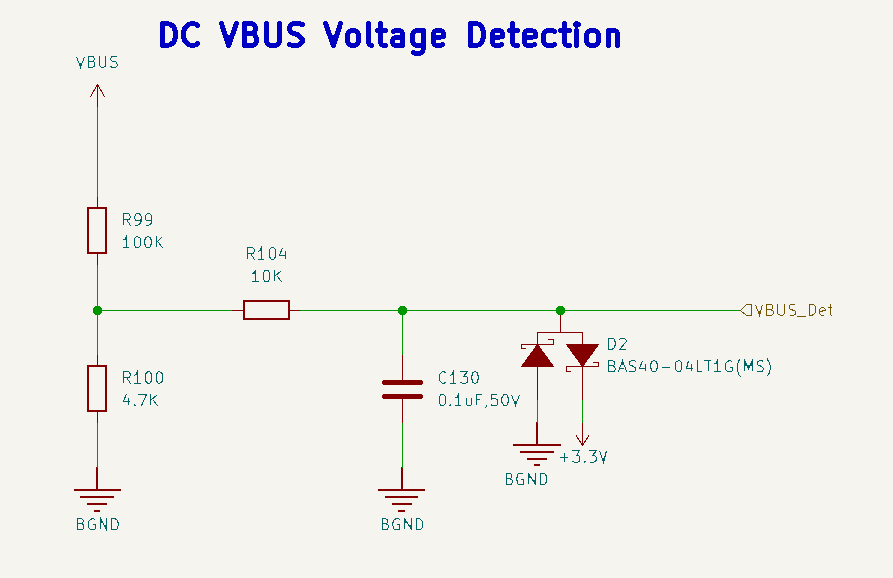
3、直流母线电压检测电路
直流母线电压采样电路主要是监控直流电源电流的大小,用于将高压直流母线电压转换为MCU可采集的 0~3.3V 模拟信号,实现过压保护、电压闭环控制。下图为母线电压检测电路:
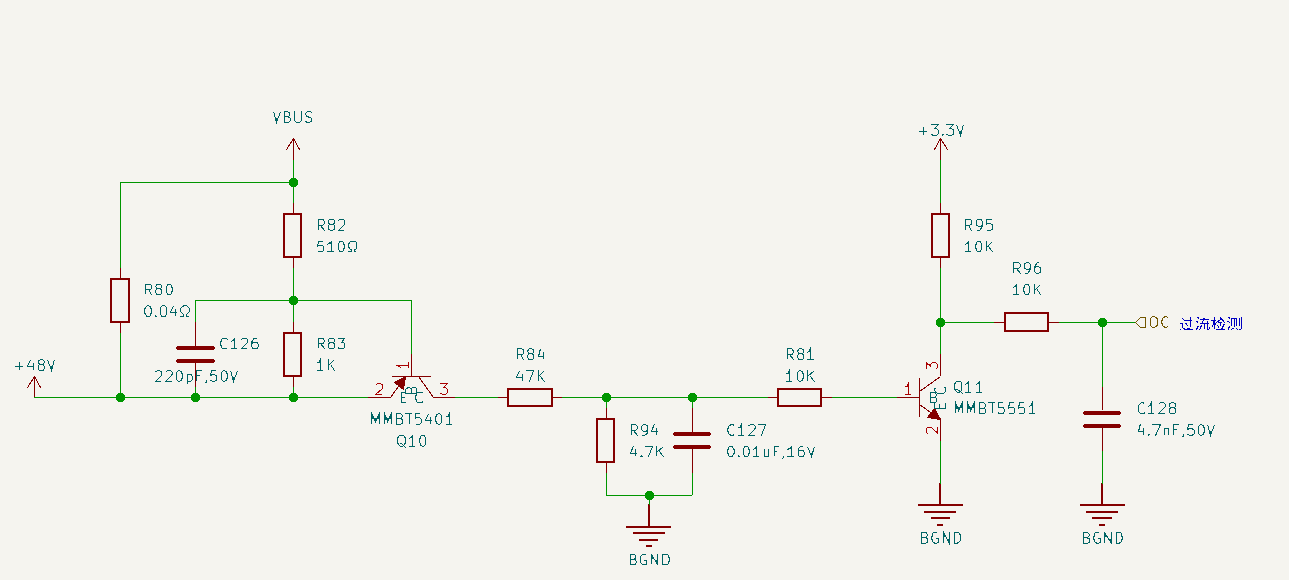
4、直流母线电流过流检测、保护电路
硬件过流采用采样电阻和三极管的组合方式,用于监测 +48V 母线电流,当电流超过阈值时"OC"信号被拉低,当MCU检测到“OC”低电平做出保护动作,电机停转。
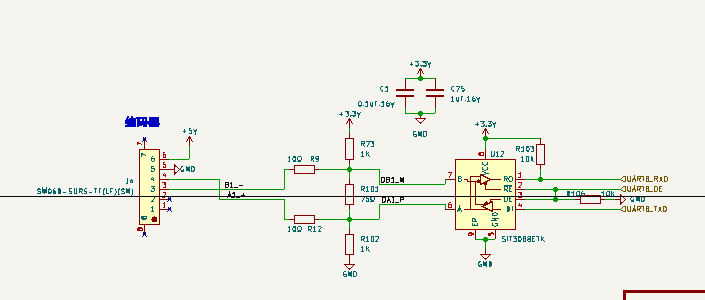
5、编码器接口
编码器驱动电路主要的功能是采集电机的旋转角度和转速,以此可对电机形成闭环控制。