[EtherCAT]ESC使用PHY的注意事项
ESC端口与PHY的关系
EtherCAT从站控制器(ESC)使用以太网PHY进行数据通信。
ESC每一个端口都使用一个以太网PHY进行通信,根据PHY提供的LINK信号硬件自动打开或关闭端口,实现网络拓扑的动态调整。
EtherCAT数据帧在ESC中各个端口传递,其内部处理框图如下:
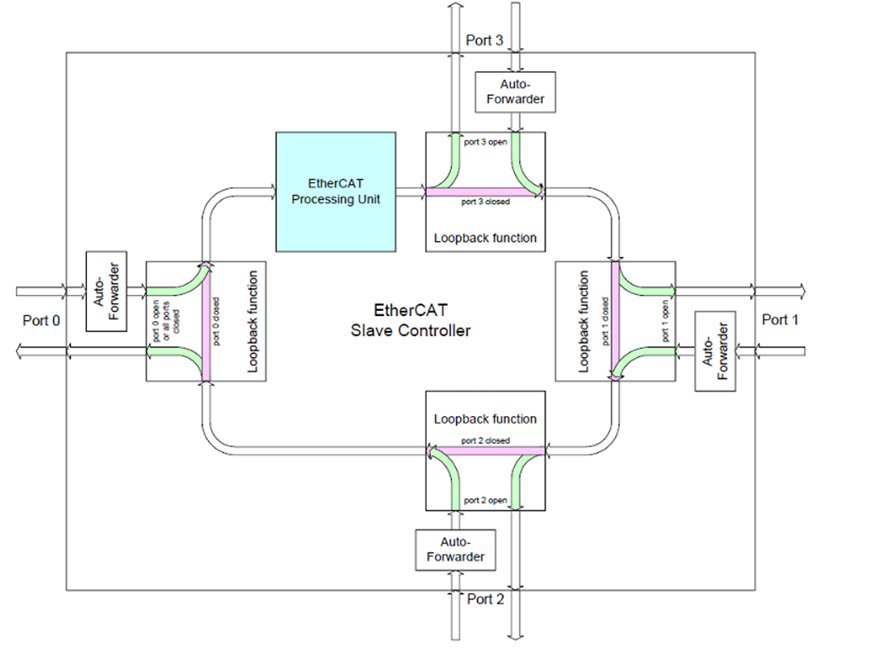
数据帧从Port0进入ESC,经过处理单元实现数据交换,之后转发到Port1,如果Port1存在有效连接且端口处于打开状态,数据帧会从Port1转发出去,访问与Port1相连的设备,之后再从Port1返回ESC, 接着数据帧转发到Port2,以此类推,最终数据帧会从Port0回到上一级设备。
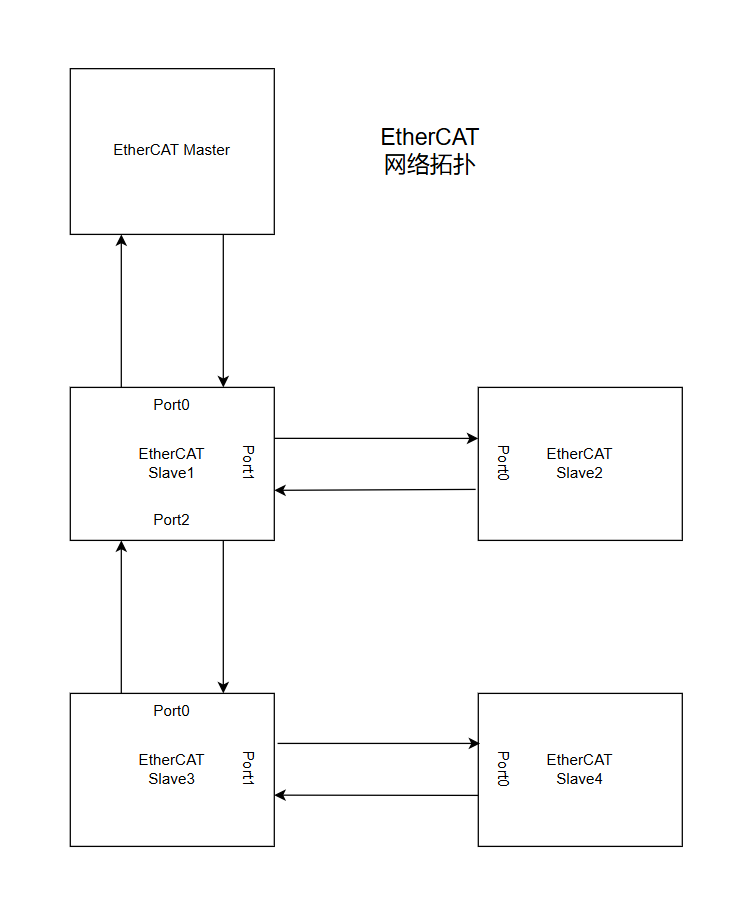
注意: 端口错误的连接顺序会造成主站设备识别的从站设备顺序与实际物理顺序不符。
在PHY通信功能能正常工作的情况下, 有以下几种典型情况:
- 当网线连接, PHY给出的Link信号被ESC识别成No Link, 造成相连的设备不能被扫描到。
- 当网线连接,PHY给出的Link信号跳变,可能能扫描到相连的设备, 但是设备连接状态同样在跳变(TwinCAT页面可查)。
- 当网线未连接, PHY给出的Link信号被ESC识别为Link,数据会被转发到该端口, 但该端口实际未连接设备,造成数据丢帧,环路开环, 会造成整个网络无法扫描到设备。
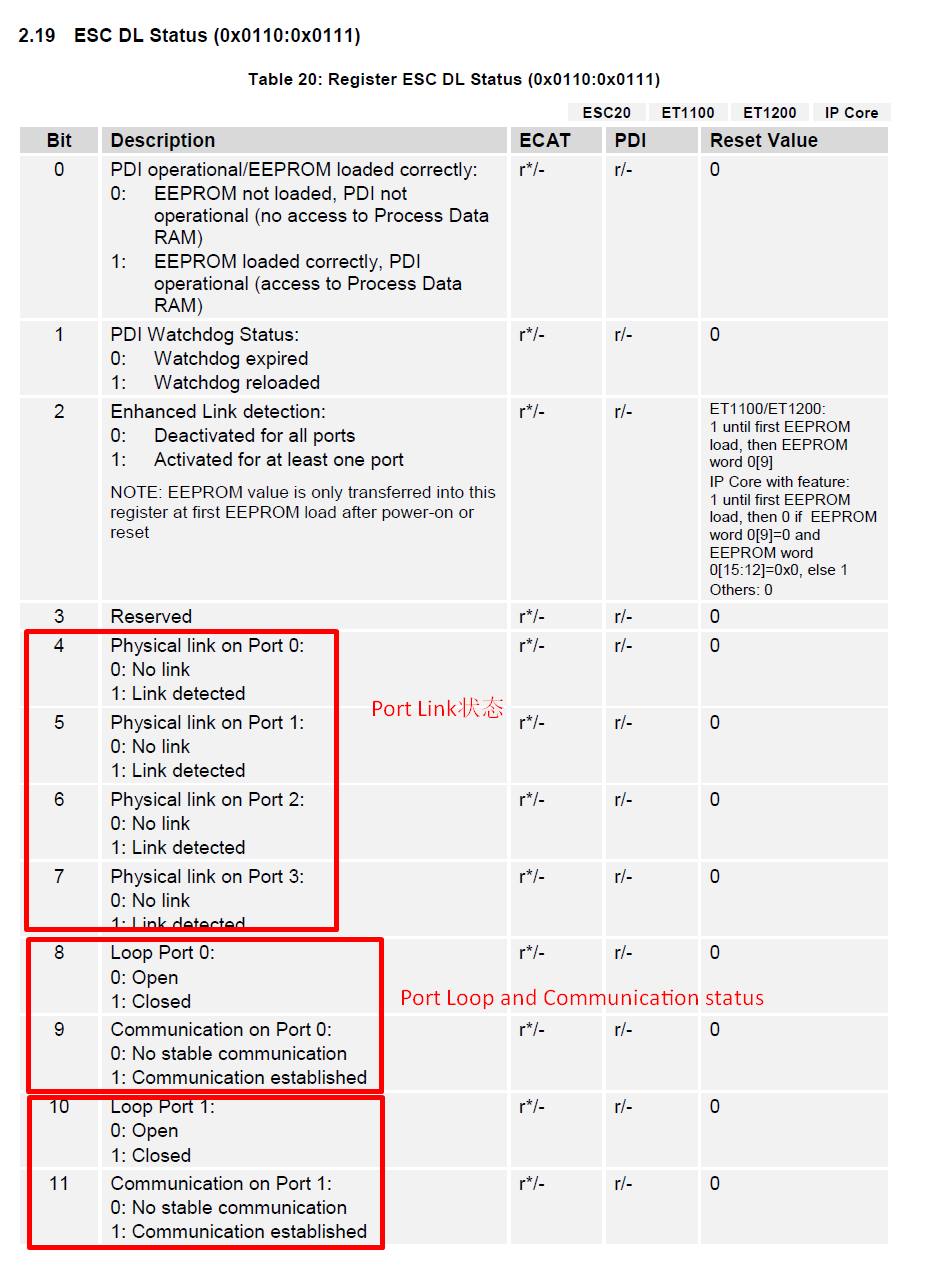
建议开发设备调试时,遇到以上问题,优先通过ESC的寄存器0x110 ESC DL Status检查确认端口的连接情况:
注意: 在使用IDE等工具寄存器窗口查看ESC的寄存器时,需要先开启ESC的时钟(ecat_hardware_init), 否则会造成总线访问挂住,影响调试进行
PHY的选用与使用
关于ESC对PHY的使用说明,倍福提供《an_phy_selection_guide.pdf》, 不仅描述了对PHY的自身性能要求,还包括PHY与ESC之间的硬件电路设计要求,请在使用PHY时参考该文档。
以下是一些实际使用过程中的常见问题:
- 推荐使用MII接口,ESC的MII接口通过省略传输FIFO具有更低的处理和传输延时。
- 连接到同一个ESC的PHY共享同一时钟,例如一个ESC支持2个端口,外部需要连接两个PHY,这两个PHY应当使用同一时钟源。
- 合理设置PHY地址,PHY地址通常由PHY的地址引脚电平决定,一个ESC会与多个PHY(数目取决于ESC端口数目)相连。这些PHY共享同一个MDC\MDIO总线,所以在硬件设计时建议为这些PHY分配不同的地址,以便在使用MDC\MDIO接口访问这些PHY时能够根据地址进行区分。
- PHY的reset引脚应该由MCU/ESC控制,以便在ESC未工作的情况下保持PHY处于Reset状态。如果PHY处于工作状态而ESC还未处于工作状态,上级相连的端口判断PHY给出的Link信号,将数据帧转发过来,而ESC尚未工作导致数据帧丢失,造成错误。
- PHY上电后默认就能进入100 Mbit/s 全双工的状态,而不是依赖MDC/MDIO接口去配置PHY之后才能工作。 该需求主要是应对ESC上电时EEPROM内容为空或者数据错误时,出现ESC配置数据校验错误,会造成MDC\MDIO不工作,不能对PHY进行配置。PHY默认也能进行通信,主站可以烧录新的EEPROM数据进行恢复。(HPM_SDK v1.8.0之后, EtherCAT例程支持直接初始化EEPROM内容, 能够避免EEPROM为空等情况。在不能配置PHY是PHY给出的Link信号电平可能不正确,需要结合Port0作为强制恢复端口的功能使用)
从目前收集的情况看,用户容易在分配合理的PHY地址和配置PHY输出合适的Link信号上出问题。部分PHY的地址引脚和LED引脚是同一引脚,地址的设置与PHY的Link(LED)信号的电平是关联的,增加了理解的难度。
PHY的地址问题:
多个端口的PHY,共用一个MDC/MDIO总线(类似I2C)。如果应用中存在要单独配置某个PHY或者获取某个PHY的状态得需求时,不同的PHY地址设置必须要满足。
通常情况下PHY的地址0时广播地址,也就是说用地址0发出的命令,全部的PHY都会响应。
如果一个场景里不存在要单独访问特定的PHY的需求,则PHY地址相同或者混乱了也没有问题,可以通过PHY广播地址0实现配置,不会影响PHY与ESC之间通过MII接口的数据通信。
推荐的PHY地址配置
| ESC的逻辑端口 | PHY的物理地址 |
|---|---|
| Port0 | 1 |
| Port1 | 2 |
| Port2 | 3 |
不使用物理地址0有助于避免地址0作为广播地址功能造成不便的影响。
PHY的物理地址与对应的端口序号保持偏移值1,该偏移值可以设置到ESC的PHY偏移地址寄存器,这样ESC使用MDC/MDIO访问PHY时,会自动在地址数据增加偏移值。这种方式在主站想单独访问端口对应的PHY时变的方便,主站只需向PHY地址寄存器中写入逻辑端口号,ESC的MDC/MDIO访问PHY时自动加上偏移值, 这样主站就不需要知道ESC各个端口所使用的实际物理地址了。
设置PHY地址偏移的函数:
/* Set PHY OFFSET */
esc_set_phy_offset(esc_ptr, BOARD_ECAT_PHY_ADDR_OFFSET);PHY输出Link信号问题
PHY的Link信号需要查询PHY的手册确认,不同厂家的PHY会存在不同。
通常PHY输出的Link信号就是LED信号,PHY通过LED指示Link状态。
PHY应该在100 Mbit/s全双工的情况下,建立稳定连接后输出稳定的Link电平给ESC,另外当LED引脚与其他功能引脚复用时,如与PHY地址引脚复用,Link信号的电平还受到设置的地址影响。
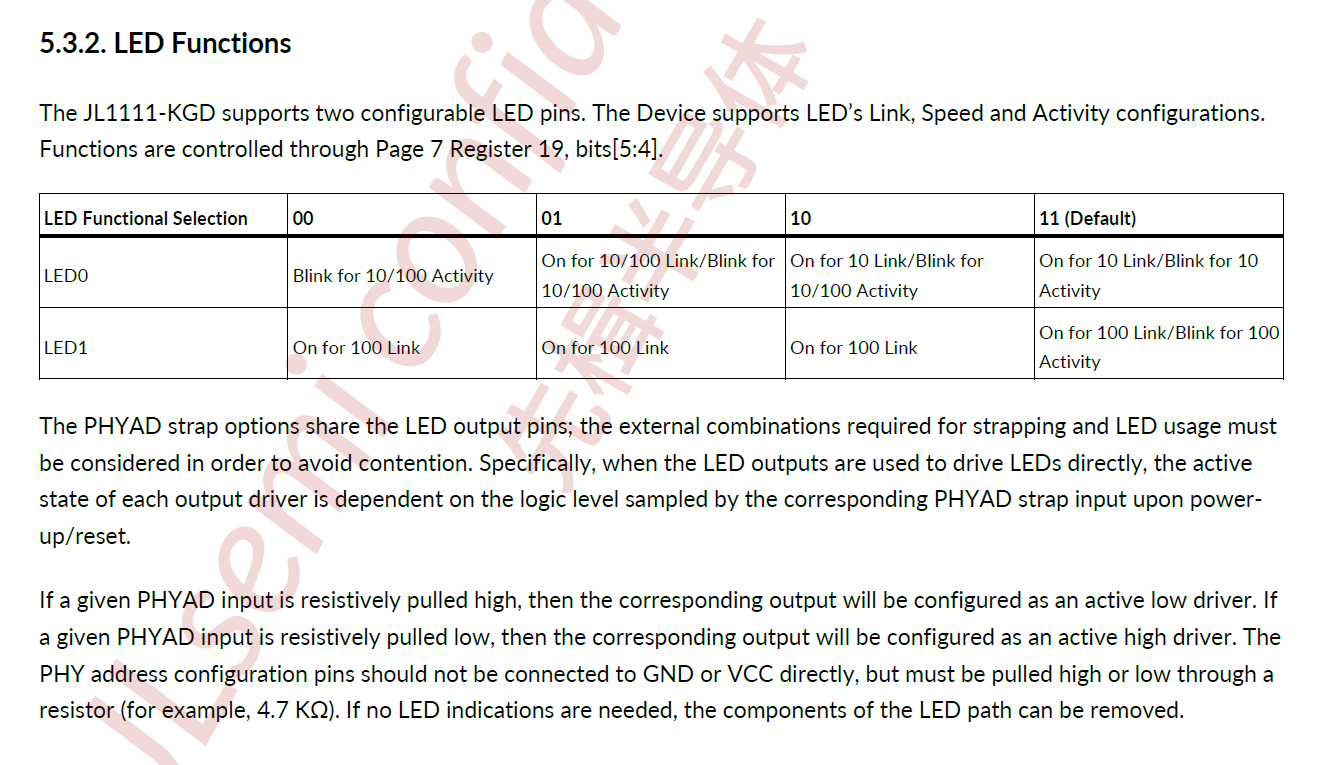
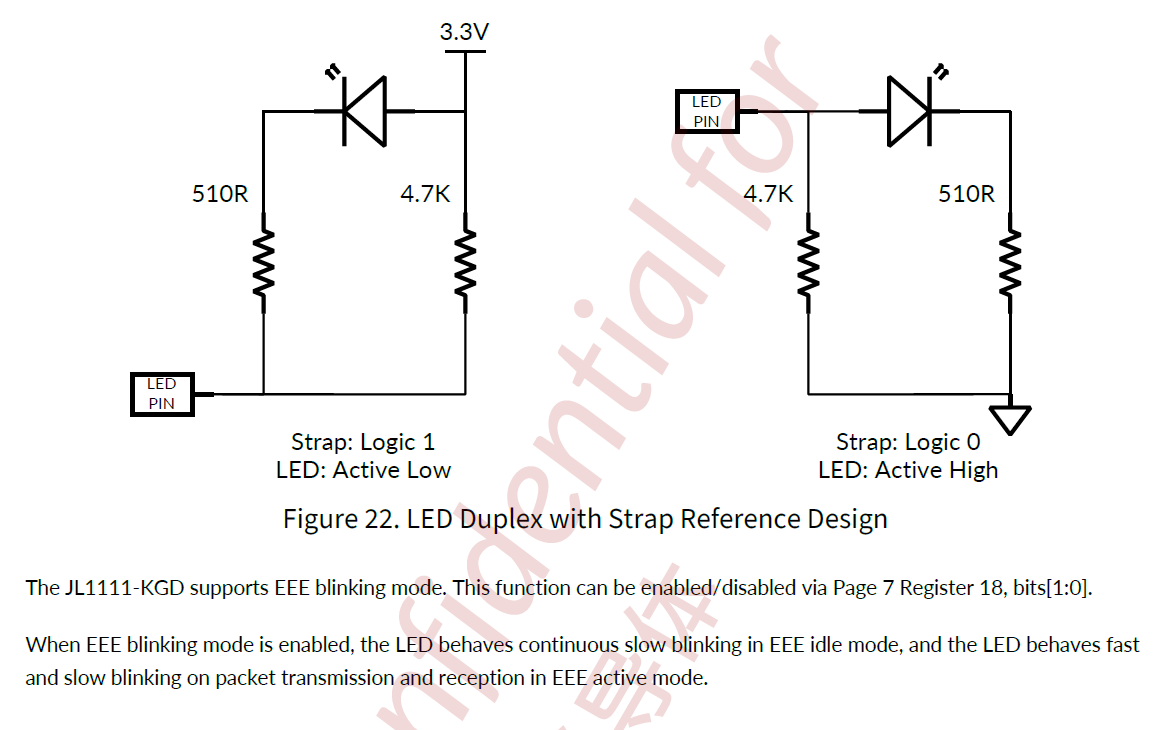
例如景略JL1111 PHY,首先其LED默认工作模式是“0b11”, 数据通信时100M的LED1会Blink(“Blink for 100 Activity”),该状态电平变化不可用。我们需要配置PHY的LED工作模式为“0b00”, 选用LED1作为100M全双工下的Link信号(“On for 100 Link”)。
但是不是配置了LED的工作模式就足够了? 实际还不行,LED1(“On for 100 Link”)中的On状态可能是低电平也可能是高电平,这与LED1引脚同时作为地址功能有关。
在PHY reset引脚释放时,PHY会 Strap LED引脚上的电平作为PHY的地址,当PHY开始工作后,LED输出电平作为状态指示信号,LED输出信号时电平极性与Strap时的电平极性有关,也就是PHY地址的设置影响LED输出指示信号的极性。
当LED引脚上拉为高(地址strap为1)时, 输出”On for 100 Link“时输出电平是低电平。
当LED引脚下拉为低(地址strap为0)时, 输出”On for 100 Link“时输出电平是高电平
由于ESC需要使用低电平作为Link状态电平, 如果PHY提供的Link信号是高电平,可以配置ESC翻转输入信号, 最终确保ESC获得的表示”100 Link”的电平是稳定的低电平。
下图为JL1111 LED引脚的功能描述:

某些PHY需要特殊配置的情况
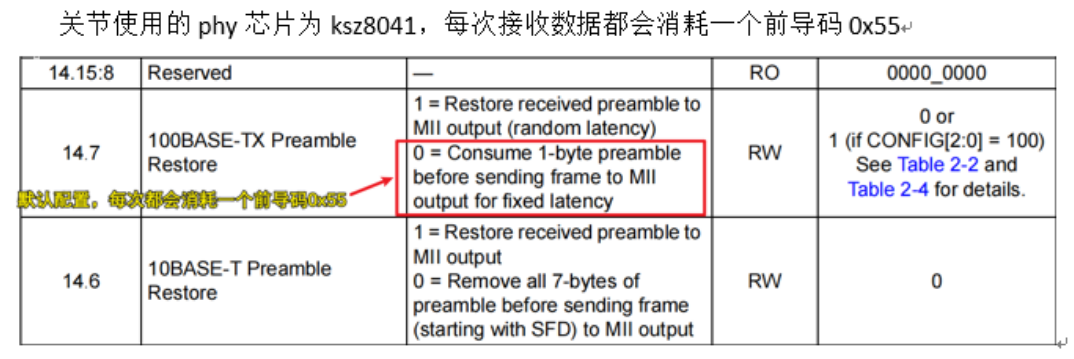
-
使用KSZ8041 PHY芯片时,发现默认的PHY配置下,每次接收会消耗Ethernet数据帧中的前导码,当前导码消耗完之后,主站设备接收到数据帧时可能将其丢弃, 造成收不到返回的数据帧而出错。
该问题在《an_phy_selection_guide.pdf》有提及。 -
如果PHY支持并默认开启EEE(Energy Efficient Ethernet)功能,也应该将其关闭,避免因为从低功耗唤醒增加传输延时。

HPM_SDK中对PHY的配置思路:
ESC的Link信号配置会使用到ESC的二级pinmux功能,并选择是否翻转信号电平。
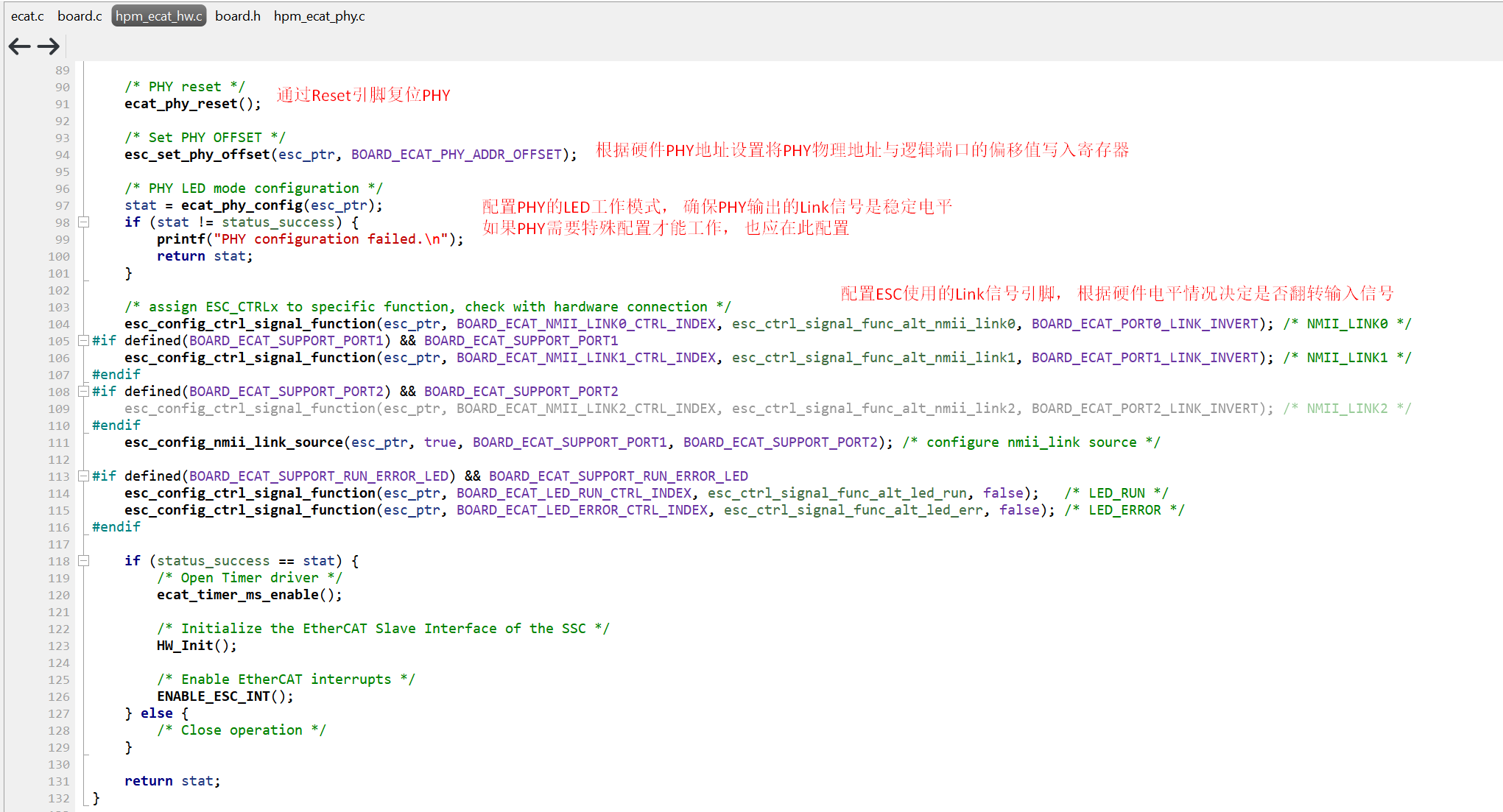
下一篇《[EtherCAT]ESC配置PHY的示例》中将举例说明PHY的配置情况。